
If the gripper in the robot is working in reverse, i.e. instead of lifting up it opens the paws and instead of opening the paws it lifts up. Swap the sockets to which the wires are connected.
If the gripper does not work at all, check that the wires are connected correctly.
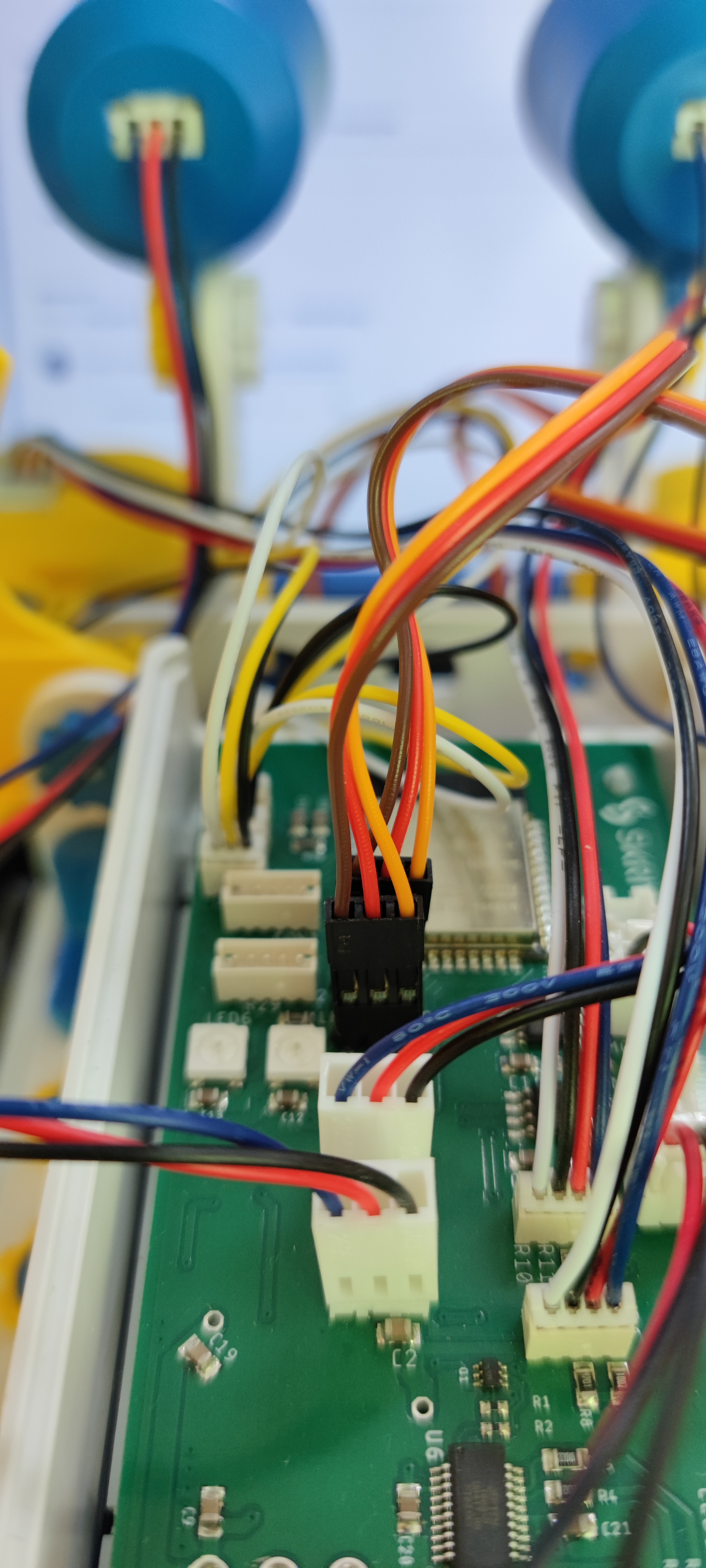
The correct connection should look like this:
Note the colours of the individual cables
If problems persist, contact technical support.